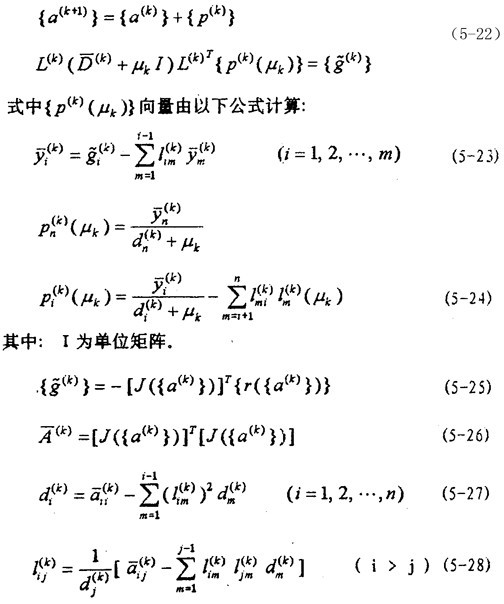
���зǾ����S���Sϵ���B푑�Ӌ�㷽�����о�
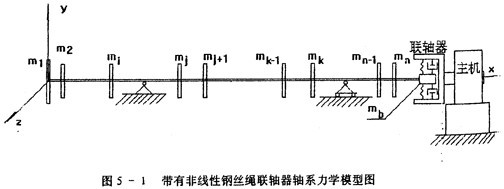
5-1���зǾ����S���Sϵ���W�͔��Wģ�͵Ľ���
�ڵ����£�����ԇ�Ļ��A�����˾��зǾ����t�����������Ļ֏���ģ�͡��@һ�£����о�һ�������@�N�S�����Sϵ��D5-1��ʾ��ԓ�Sϵ��n���A�P����䓽z�K�S���c���C���B�ӣ�������ԭ�t�������Wģ�ͣ�
1.ÿ���A�P��ҕ�鄂�Ԅ��|�����ЈA�P���|��mi���в�ͬ�̶ȵ�ƫ�ľ�ei���D�S�S����ֱͨ�^���A�P�Ď����ģ�
2.�O�S�С��S�����Լ��S������ͬ�ԣ��o����ϵ��D5-1��ʾ��֧��̎���ɺ�֧��
3.�S���ĄӶ�̎����һ�����|��mb�������S�����Ӷ��c���C�S���B�ӣ����C�������Sϵ�S���f���^���^�֣������^��׃���^С���ʌ��S�����Ӷˡ����C�Sҕ��һ�w��λ�ƞ��㣬�S���ĄӶ��c���Ӷ�֮�g�ɷǾ��ԏ��ɼ��Ǿ����������Y��
4.�Sϵ��Сλ����ӣ��Һ��Ի��DЧ����
�����C�Խ��ٶȦ��D�ӕr���Sϵ�ڸ�ƫ�����������®a�����B��ӣ����\���ַ��̿ɱ�ʾ�飺
ʽ��

�քe���Sϵ���|������ꇡ������ꇺ̈́��Ⱦ�ꇡ�����������

��a��b�����������
����y
i,z
i�քe���Sϵ�е�i���A�P��y,z�����λ�Ʒ�����

=dy
i/dt��

=d
2y
i/dt
2��

=dz
i/dt��

=d
2z
i/dt
2�քe�錦����λ�Ʒ���y
i,z
i���ٶȺͼ��ٶȣ�y
b,z
b���S���ĄӶ˼����|���Km
b��y,z�����λ�ƣ�

=dy
b/dt��

=d
2y
b/dt
2��

=dz
i/dt��

=d
2z
d/dt
2�քe�錦����λ�Ʒ���yb,zb���ٶȺͼ��ٶȣ�

,

��y,z����ļ���������������m
ie
i��
2cos����t+

����m
ie
i��
2sin����t+

���քe��y,z�����ƫ����������

��

��y
b��

����t),

��

��z
b��
����t���քe��Ǿ��ԏ����S���֏���
��y,z����ķ�����

���i���A�P�|��ƫ�ĵij���λ�ǣ����Sϵ�oֹ�r����i���A�P�|�ĺ͎������B���cˮƽ�S�ĊA�ǡ�
���ڼ��O�S�С��S�����Լ��S������ͬ�ԣ�ʽ��5-1����ʽ��5-2���ⷨ��ͬ��ֻ��ҪӑՓ����֮һ���ɡ�
ʽ��5-l����ʾһ���ֲ��Ǿ��ԏ��Ժ�����Ԫ�������ϵ�y�����@�Nϵ�y�����F�г�Ҏ����������Ƿdz����y�ģ���ˣ�������GILM����A�lչ��һ�N�Q��SSGILM(Separate System-Gal-erkin and Improved Levenbery-Marquar-dt���ķ�����������ַ��̽M��
5-2 SSGILM��
һ.����ַ��̽M�ĸČ��ͽ���
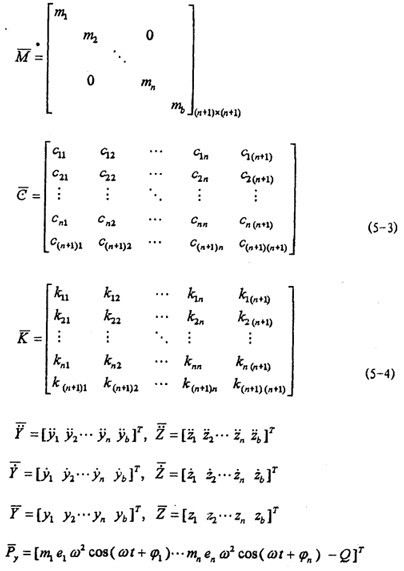
���Ȱ��оֲ��Ǿ���ϵ�y����ַ��̽M��5-1��ʽ�Č���ֻ�о��Գ�ϵ�����ַ��̽M��һ�����зǾ���׃�������ַ��̃ɲ��֣�
ʽ�У�
ʽ��5-4����P
y���y
b��
����5-5����F
j���y
j��

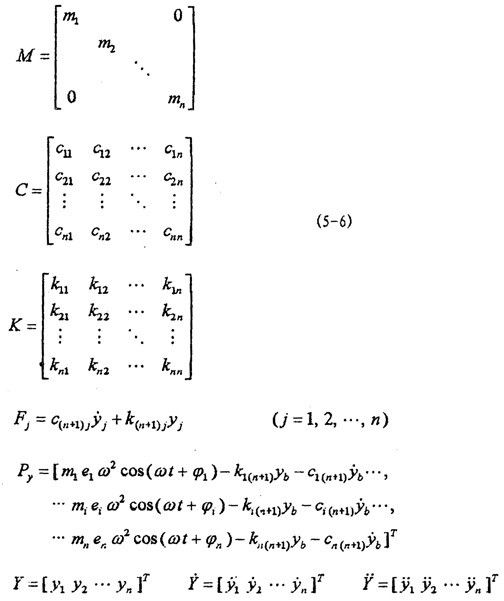
��j=1��2���� n�����@�ӣ��Sϵ�ֳ��\���ַ������ăɂ���ϵ�yһ�����Sϵ��ϵ�y�ͷǾ����S����ϵ�y��
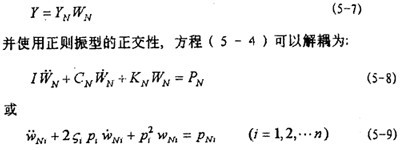
ʽ��5-4���龀�Է��̣�����Ҏ����������o����ĸ��A�����l��p
i�Լ�������������Y
i������i=1��2������n����Y
i�քe���������V�x�|����ƽ����

�õ����t����Y
Ni�������������t��������W
Ni������5-4��ʽ�M������׃�Q��
ʽ�У�W
Ni�����t��������W
N�еĵ�i��������

��

���քe�������r�gt��һ�Ό����Ͷ��Ό�����I���λ��ꇣ� s
i=��a+

��/2P
i=c
ii/2p
im
i�����ͱ�������ȣ�P
Ni��P
N=

P
y�����������еĵ�i��������
�����t����׃�Q���mȻ�õ�������ϵľ����ַ��̽M��5-9)�����ǣ�5-9��ʽ��Ȼ����������ɶ����ϵ�y�ǘ���⣬��飨5-9��ʽ�еļ���������δ֪�����λ��y
b������ٶ�
�����y
b��֪���Ϳ��ԏģ�5-9��ʽ�н��W
Ni���M�������ɣ�5-7��ʽ�õ���y
i�������Ҫ���y
b��
�D5-1��ʾ�Sϵ�����C�������D�ӕr�����A�P�|��ƫ�Č��a������ƫ�ļ������������ڶ��µ�ԇ�Y�����S���Ǿ��Ի֏���Q�Ǖr�g�����ں�������ˮ��Sϵ�����S���@�N�ֲ��Ǿ���Ԫ���r�������O����λ��푑��������Եģ������Oy
b���������ʽ��
��ʽ��5-6������5-8���ͣ�5-9����֪���������ɶ�������ɣ�һ����|��ƫ����m
ie
i��
2cos����t+
����һ��ǻ֏���k
i��n+1��y
b-c
i��n+1�� ������⣨5-8��ʽ���㣬����5-10�����루5-8��ʽ���������t�������ֽ�ɣ�
PN= Py=PN1+PN2 ��5-11��
ʽ�У�
�ɣ�5-11���ͣ�5-12��ʽ��֪����{a}��֪���Ϳ����ɣ�5-12��ʽ�����W
Ni����W
Ni�루5-7��ʽ�����Եõ���y
i���ɴ˿�����y
b���}�D������{a}=[a
0 a
1 
���}��
����Galerkin����
�������{a}������o���V�r�g��=

���t��5-10��ʽ���Ԍ��ɣ�
ʽ��[q
0 q
1 
�� q
N 
]
T�ĸ��������S���֏���

�ĸ����~���������C������ϵ��������[f
10 f
11 
�� f
1N 
]
T����[f
jo f
j1 
�� f
jN 
]
T����[f
n0 f
n1 
�� f
nN 
]
T�քe�鏗�Ի֏���������֏�����F
1=k
��n+1�� 
+c
��n+1��
����F
j=k
��n+1��
+ c
��n+1��
����F
n=k
��n+1��
+
��n+1��
�ĸ����~���������C������ϵ��������
�������ƌ���֪����⎧�зǾ����S���Sϵ�ķ��B푑������Ԛw�Y�������2N+1���Ǿ��Դ������̽M��5-15�������n���ַ��̽M��5-4)�����c�������ɣ�5-15��ʽ���2N
+1��δ֪����a
0 a
1 
��
T����(5-15��ʽ��֪������ͬ��һ��ķǾ��Է��̽M����һ��ķǾ��Է��̽M�У�δ֪�����@���ģ�����5-15��ʽ��δ֪��{a}���[���ģ�����{q����{a���ķǾ�������������ͨ�^��y
b�ĸ����~չ�_ʽ���˻֏���O�ı��_ʽ�Ё�ֱ����ã��@�����Q���_ʽ�е����

���ܱ�ʾ��{a}���@�����ľ��ʡ����Ҫ���ɣ�5-1��ʽ��ã�a}��߀��Ҫ��Q�ɂ����}��һ�������

,������ʲô�����[��{a}�ķ��̽M��5-15)������͛Q�@Щ���}��
����ILM��
���Ǿ��Է��̽M�����ɣ�
������������{r��{a}��}�зǾ����{q��{a}��}�ď��s�ԣ����е���ⷽ���Dz��Ô�ֵ����
����ʽ��5-17���Ĕ�ֵ����↖�}���҂������D�����c֮��Ч��Ŀ�˺�����
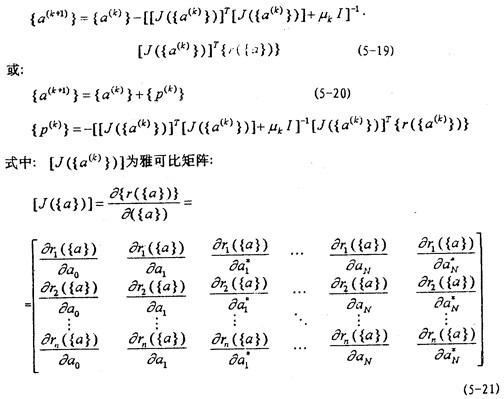
�ĘOСֵ���}�����Ǿ��ӷ��̽M��5-17���Ľ�{a}����ͨ�^��˘OСֵ���}����С���˽�õ����ڴ˲���һ�N���M��LM�㷨��ILM��������@һ���}��ILM���Ļ���˼�뺆�����£�
��LM�����ڣ�5-18�����}�r��������ʽ�飺
ʽ�Ц�k��LM������I���λ��ꇣ�{p��k������k��}�������ƽ���5-17��ʽ���У������������ه�څ�����kֵ����������������L�ȡ�
LM�㷨�ă��c�ǣ���Ӌ�㣨5-20��ʽ�r�����Բ����][J��{a
��k��}��]�Ƿ�M�ȣ���
k������

��{a}���½����������ã�{p
��k������
k��}��

��{a}����{a
��k��}̎���½������ҿ������@�ӵĦ̡�0��ʹ
��{a
��k��}+ p
��k����<
{a
��k��}����������k�����S����ֵ������{p
��k������
k��}�ķ���Խ��Խ�ӽ�
��{a
��k��}��ؓ�ݶȷ��˕r���Ք��ٶ�׃�������Ō��ˌ���ʼ����{a
��0��}��Ҫ��ȱ�c���x��̝M��
��{a
��k+1��}��<
��{a
��k��}���r����һ���������E����Ҫ�����ⷽ�̽M��5-20�������������Ӌ����������б�Ҫ��LM���M�и��M����ʹ�x���
k�r��������̫���Ӌ���������ܱ��C�M���½����|������һ�����Ք��ٶȣ����ܸ��ƣ�5-20�����̽M�IJ��B�ԡ����M��ĵ�����ʽ�飺
ʽ�в�

����
 ��k��
��k����Ԫ�ء�

��

�քe����L
��k����
 ��k��
��k����Ԫ�ء���ʽ��5-23���ͣ�5-27���ͣ�5-28���в���������
k����˸�׃��
k�r��ֻ������Ӌ��(5-24),������Ҫ�����M�����Ƿֽ⡣�@Ȼ�����M����㷨�p���������x����m�Ħ�
k��������Ӌ�������@�N�㷨�cLM���IJ�֮ͬ̎�������������L
k �����ˆ�λ���I�������H�{���˾��
 ��k��
��k����������Ԫ�أ����Ҍ���������M�����{��������LM���и��õ��Ք��ٶȡ�
���˵õ����m�Ħ�
kֵ��ʹ����������{p
��k������
k��}������õ؝M��

��{a
��k��}+ p
��k����<

{a
��k��}���������Ք�������LM������ʼֵ{a
��0��}Ҫ���^�ߵ�ȱ�c�����IJ���һ�N�x����m��
kֵ�����㷨����LM���M���˸��M���x��Ӌ�㲽�E���£�
��.ȡ����ʼ����{a
��0��}�ͳ�ʼֵ

�������{����
kֵ�������{��ϵ��v,

����ȡ��СһЩ��ȡ
=10
-2��v=5��
��.����5-21) ʽ������ã�J��{a
��0��}��]��Ȼ��5-26��ʽ���0
(0) ���ٸ�����5-27������5-28��ʽ��þ��L
(0����
 ��0��
��0���еĸ�Ԫ�أ���(5-25����(5-23���ͣ�5-24�����{P
��0����
��}������5-17�����{r��{a
��0��}��}������5-18����
��{a
��0��}������Ӌ��{a
��1��}={a
��0��}+{P
��0����
��}��
��{a
��1��}��
��.(l�������
��{a
��1��}����
��{a
��0��}�����t��
/v����
����Ӌ��{P
��0����
/v��}���µ�{
 ��1��
��1��}��
��{
 ��1��
��1��}������a�������
��{
��1��}����
��{a
��0��}�����tȡ����
0=
/v����b�����
��{a
��1��}��>
��{a
��0��}�����tȡ����
0=
����2��
��{a
��1��}��>
��{a
��0��}�����t�������ֵ��ȡ

=v
m ����

����
����Ό�m=1��2�����r��
���루5-24���M��Ӌ�㣬���ȡ��ʹ����ʽ
��{a
��0��}��+{ P
��0����
��}��<
��{a
��0��}����������������

������
�����
0�Լ�{a
��1��}+{P��

��}��
��.�ٶ�����õ�k�ν���{ a
��k��}��������

=��
k-1�����[J��{ a
��k��}��]��
��k����L
��k����
��k����r��{ a
��k��}��}��
��{ a
��k��}����Ȼ�����{P��

��}����Ӌ��{ a
��k+1��}={ a
��k��}+{P��
��}��
��{ a
��k+1��}����
��.��1�����
��{ a
��k+1��}����
��{ a
��k��}�����t�p��
��
/V����
����Ӌ��{P��
/V ��}�͌�����{
 ��k+1��
��k+1��}��
��{
 ��k+1��
��k+1��}����a�����
��{
��k+1��}����
��{ a
��k��}�����tȡ����
k=
/V ����b�����
��{
��k+1��}��>
��{ a
��k��}�����tȡ����
k=
��2�����
��{
��k+1��}��>
��{ a
��k��}�����t����
ֵ����ȡ

=v
m ,��

����
,��Εrm=1��2�����r��
���루5-24��ʽ�M��Ӌ�㣬���ȡ��ʹ����ʽ
({ a
��k��}+{P��
��}<
��{ a
��k��}����
��.Ŀ�˺���
��{a}����k�ε�����k+1�ε�������M��^���`��������`��ȣ����Ɍ�{ a
��k+1��}������ƽ⡣������M�㣬�t��{ a
��k+1��}����{ a
��k��}����
k�����
k-1ȥ���в��E�ݣ�ֱ���M��Ҫ���ֹ��
���ˣ���5-17��ʽ����ⷽ���ѽ������������գ�5-17��ʽ���{a}߀��Ҫ���

��{q}�ͣ�f
j����j=1��2������n�������⣬���ã�5-21��ʽ��[J��{a}��]�r����r
i��{a}�����[������{a}��ƫ�������韩�������Ӌ��[J��{a}��]�r����Ҫ��Щ̎�����ɣ�5-15��ʽ��֪�������l��ȵ�2N+1���Ǿ��Դ������̽M�����Ǿ����t���֏���
�Ǖr�����������⣨5-15���r��Ҫ�M���l���c�r���׃�Q������һЩ���W�ϵ�̎����������һ������
5-3һ����SSGILM��Ӌ�㎧�зǾ����S���Sϵ���B푑�
�������δ֪����{a}��߀�������¹�����
һ����������{r��{ a��k��}��}��Ӌ��
ҪӋ��{r��{ a
��k��}��}���S���֏���

�ĸ����~����չ�_ʽ�����C������ϵ�����������ڽo����{ a
��k��}�������ɕr����_ʽ
����l��ȵ�{q��{ a
��k��}��}������횰����²��EӋ�㡣
���ȣ��ɽo�����l������{q��{ a��k��}��}������ ��N���r���xɢֵ��ӛ��Y��1����Y��N����DY��1����DY��N������Σ�����ʽ��� ��ֵ
Ȼ�� �Լ� �r���xɢֵ����������еõ��Ļ֏���
�ı��_ʽ��3-8������3-12������3-27���ͣ�3-41��ʽ����Ì�����{ a
��k��}�Ļ֏���Q��һ�����ڃ�N��Q�ĕr���xɢֵ�M��FFT׃�Q�����ɵõ��Ǿ��Ի֏���Q���l��ȵĸ��C��������ϵ������{q��{ a
��k��}��}
2. {fj��{ a��k��}��}��Ӌ��
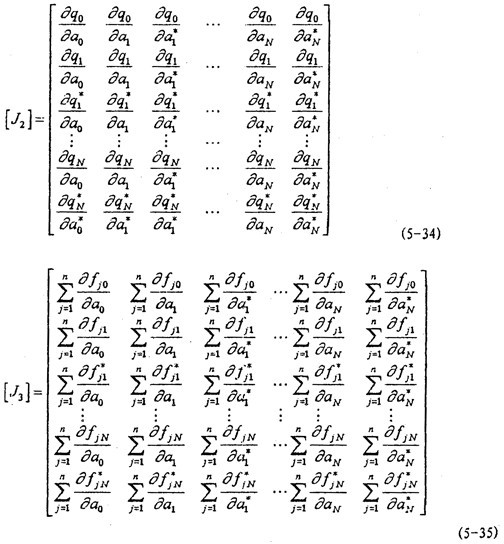
{fj��{ a��k��}��}��ʽ��5-6���л֏���Fj�ĸ����~����չ�_ʽ���C��������ϵ��������������{ a��k��}�o���r��������5-2��������������ø��� �� ��j=1��2������n��������ɣ�5-6��ʽ�л֏���Fj�ĸ��C��������ϵ������{fj��{ a��k��}��}��
���{q��{ a��k��}��}��{fj��{ a��k��}��}���루5-15��ʽ���ɵõ�{r��{ a��k��}��}��
�����ſɱȾ��[J��{ a��k��}��]��Ӌ��
��Ӌ�㷽����Ҋ�����ſɱȾ��ʽ��5-21���ֽ��������ꇣ�
[J��{ a��k��}��]=[J1]+[J2]+[J3] ��5-30��
1.[J1]��Ӌ��
�ɣ�5-15���ͣ�5-21��ʽ�ɵã�
[J1]=
2. [J2]��Ӌ��
[J2]��Ӌ�㌍�H�Ͼ��nj� {q��{ a��k��}��}/ { a��k��}��Ӌ�㡣���ڻ֏���Q�ĺ������_ʽ��{ a��k��}���[��������˲�������Q�ı��_ʽֱ���M��FFT׃�Q�����{q��{ a��k��}��}��Ҳ������{q��{ a��k��}��}ֱ�ӌ�{ a��k��}����ƫ�������õ�[J2]��
�ɵ������е�ʽ��3-8������3-12������3-41���ͱ����е�ʽ��5-13���ɵã�
ʽ�У� ���� ���� ����ֱ����Q�ı��_ʽ�ͣ�5-13���M�н���Ӌ��õ��� / { a��k��}�� / { a��k��}Ҳ�����ɣ�5-13��ʽֱ���M�н�{ a��k��}���xȡ������{ a��k��}��Ȼ��Ӌ��һ�����ڃȌ����� ��{ a��k��}+��{ a��k��}���� ��{ a��k��}��ֵ���ã�
�ɣ�5-32��ʽ��� / { a��k��}�ĕr���xɢֵ���M��FFT׃�Q���ɵõ��l���е� {q��{ a��k��}��}/ { a��k��}��
3. [J3]��Ӌ��
[J3]��Ӌ�㌍�H�Ͼ���ƫ���� {fj��{ a��k��}��}/ { a��k��}��Ӌ�㡣Ӌ�㷽���cӋ�� {q��{ a��k��}��}�ķ�����ƣ��ʲ���٘��������[J2]��[J3]���քe��ʽ��5-34������5-35����
��Ӌ���{r��{ a��k��}��}��{J��{ a��k��}��}֮�Ϳ���5-2���аlչ��ILM���M����������Ӌ�㣬�ɳ�ʼ����{a��0��}���������ƽ��M�㾫��Ҫ���{ a��k+1��}��Ȼ����루5-10������5-11������5-12���ͣ�5-7����������S���ĄӄӶ��|��Kmb�ķ��B푑�yb�Լ��Sϵ�и��A�P�D�ӷ��B��Y��ͬ�r߀���Եõ������ķ��l�D��
5-4С�Y
�������зǾ���������n+1�����ɶ��Sϵ���ıP�|��ƫ�Įa���ļ����������·��B푑�Ӌ�㷽���M�����о�����GLM������A�������һ�N�Q��SSG
ILM (Separate System-Ga1erkin and Imp-r0ved Leenberg-Marquardt�ķ���������Ӌ��ֲ����зǾ��������Sϵ�ķ��B푑���
��Ҫ�������£�
1.�������зǾ������n+1�����ɶ��Sϵ��ֹ���Wģ�ͺ͔��Wģ�ͣ���������@�N�ֲ����зǾ���Ԫ�����Sϵ�ķ��B푑������Sϵ�ֳɃɂ���ϵ�y��������n�����ɶȵľ����Sϵ�ͺ��зǾ���׃�������S����ϵ�y��
2.�������Sϵ��ϵ�y�\���ַ��̽M�����t����׃�Q�M�н�ź̎�������Ǿ���׃�������S����ϵ�y�\���ַ�����Galerkin����׃��һ�M�[��ϵ������{a}�ķǾ��Դ������̽M��
3.ᘌ�LM����ȱ�c���������е��x����m��ֵ�ķ����ͼӿ��Ք��ٶȵ��㷨��LM���M���˸��M���ø��M�㷨������õ��ķǾ������̽M�е�δ֪����{a}�M������Ӌ�㣬������ֶ����зǾ��������Sϵ�ķ��B푑���